Phase Estimation in AWGN#
In this section, the phase \( \theta \) in the measured signal \( y_i = a \sin(\beta i + \theta) + n_i \), \( 1 \leq i \leq k \), is to be estimated.
Conditional PDF#
For convenience, the conditional pdf of the received signal (for non-coherent detection in AWGN) is
where \( \kappa_1 \) is a constant independent of both \( a \) and \( \theta \).
An ML estimate for the phase can be obtained by computing the maximum of \( \ln p(\vec{y}|a, \theta) \), i.e.,
Ignoring the meaningless solution \( a = 0 \), this equation can be solved for the ML estimate \( \hat{\theta}_{ML} \), yielding
where
MAP Estimation#
A MAP estimate for the phase can be computed by utilizing Bayes’ rule identity
Assuming that the amplitude and phase are independent, this equation becomes
Substituting the conditional pdf \( p(\vec{y} | a, \theta) \) obtained, i.e.:
into this equation results in
where
is a constant independent of \( \theta \).
For any specific a priori pdf \( p(\theta) \), the maximum of \( p(a, \theta | \vec{y}) \) may have to be determined numerically.
Example#
In this example [B2, Ex 11.6], if we assume that the phase is uniformly distributed in the interval \( (-\pi, \pi) \), a MAP estimate of \( \theta \) can be obtained by differentiating \( p(a, \theta | \vec{y}) \) with respect to \( \theta \), i.e.,
Setting the previous equation to zero and solving for \( \hat{\theta}_{MAP} \) yields
Phase-Locked Loop (PLL)#
Often it is not possible to obtain an explicit representation of a parameter estimate.
Nonetheless, the equations that lead to a MAP or ML estimate can usually be implemented.
To illustrate this concept,
recall that
The equation
becomes
or
This equation can be implemented in approximate form using the block diagram shown in Figure 11.11, where \(\tilde{\theta}_{ML}\) is an approximation of \(\hat{\theta}_{ML}\).
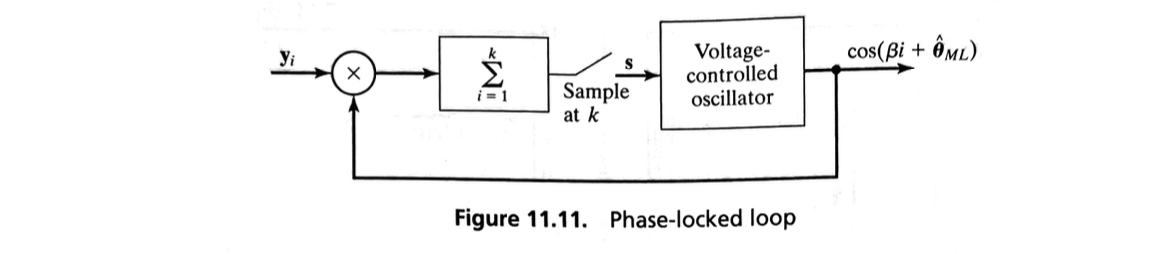
The block diagram shown in this figure is known as a phase-locked loop (PLL).